AI Algorithms
 Icra 2024
Icra 2024
ADR Wins Best Paper Award on UAVs at ICRA
Our paper “Time-Optimal Gate-Traversing Planner for Autonomous Drone Racing” won the prestigious Best Paper Award in ICRA 2024, held in Yokohama, Japan.
Read More Experiment
Experiment
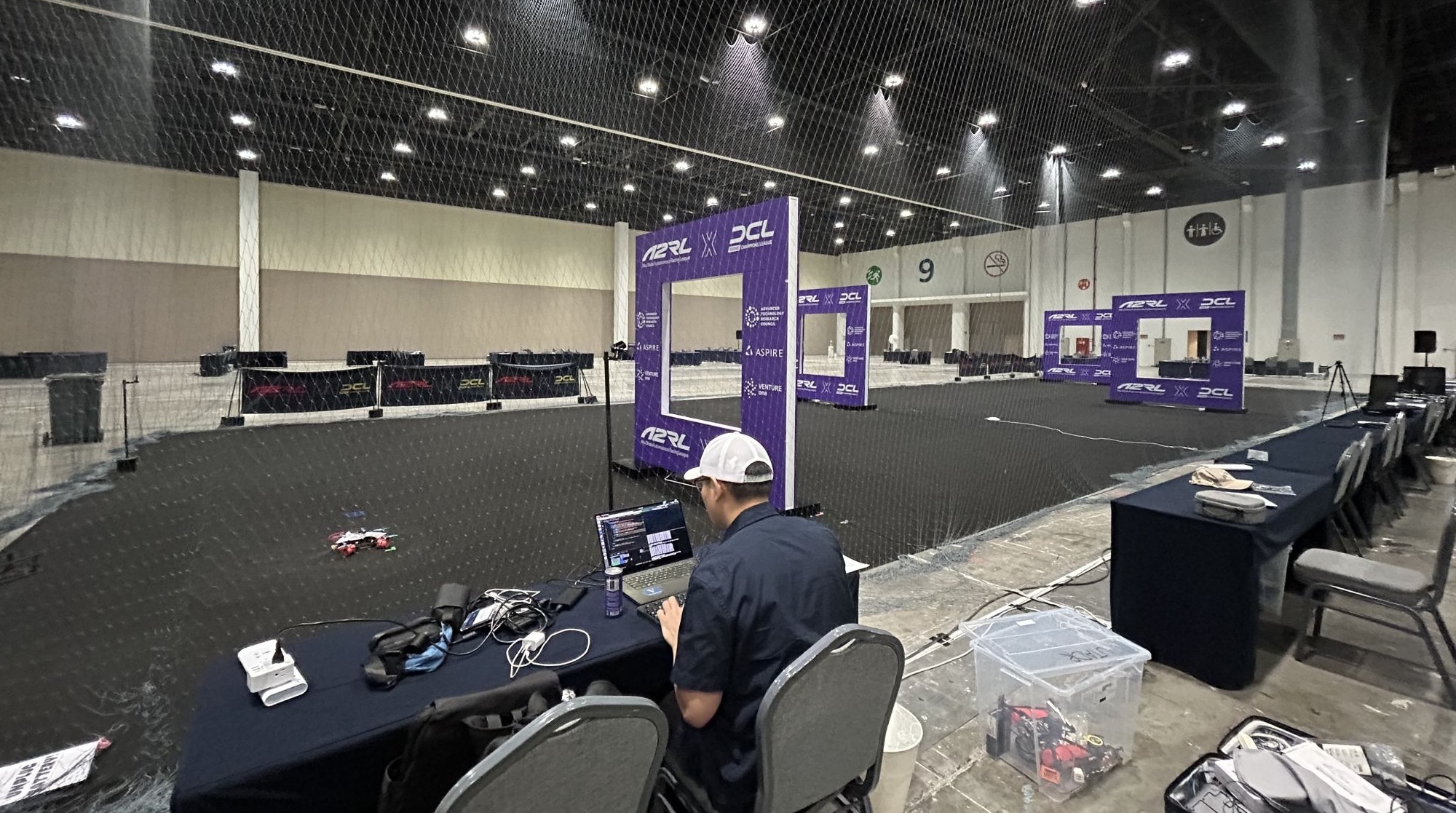
Flight in a Real Race Course
We are testing the performance of our time-optimal planning algorithms on a real race track. The goal is to navigate an autonomous FPV drone through 19 gates, made of foam pillars, in the shortest possible time without any collisions.
Read MoreLatest Posts

Simulation Development
15 Aug 2024