UAV Technology
 Slam
Slam
Simulation Development
In July we began modifying a simulator - FlightGoggles developed by MIT. The simulator utilized the Unity engine with ray tracing, which enabled rendering of photorealistic images that can be used for perception algorithm development. Our modification allowed us to add custom gates to the scene, as well as a thirst-person view mode that can visualize light trail of the drone flying through a trajectory.
Read More Experiment
Experiment
Autonomous Drone Racing Meets LEDs
We mount four pairs of LEDs on the drone’s arms to enhance visibility during flight, and showcase a fascinating time-optimal flight trajectory.
Read More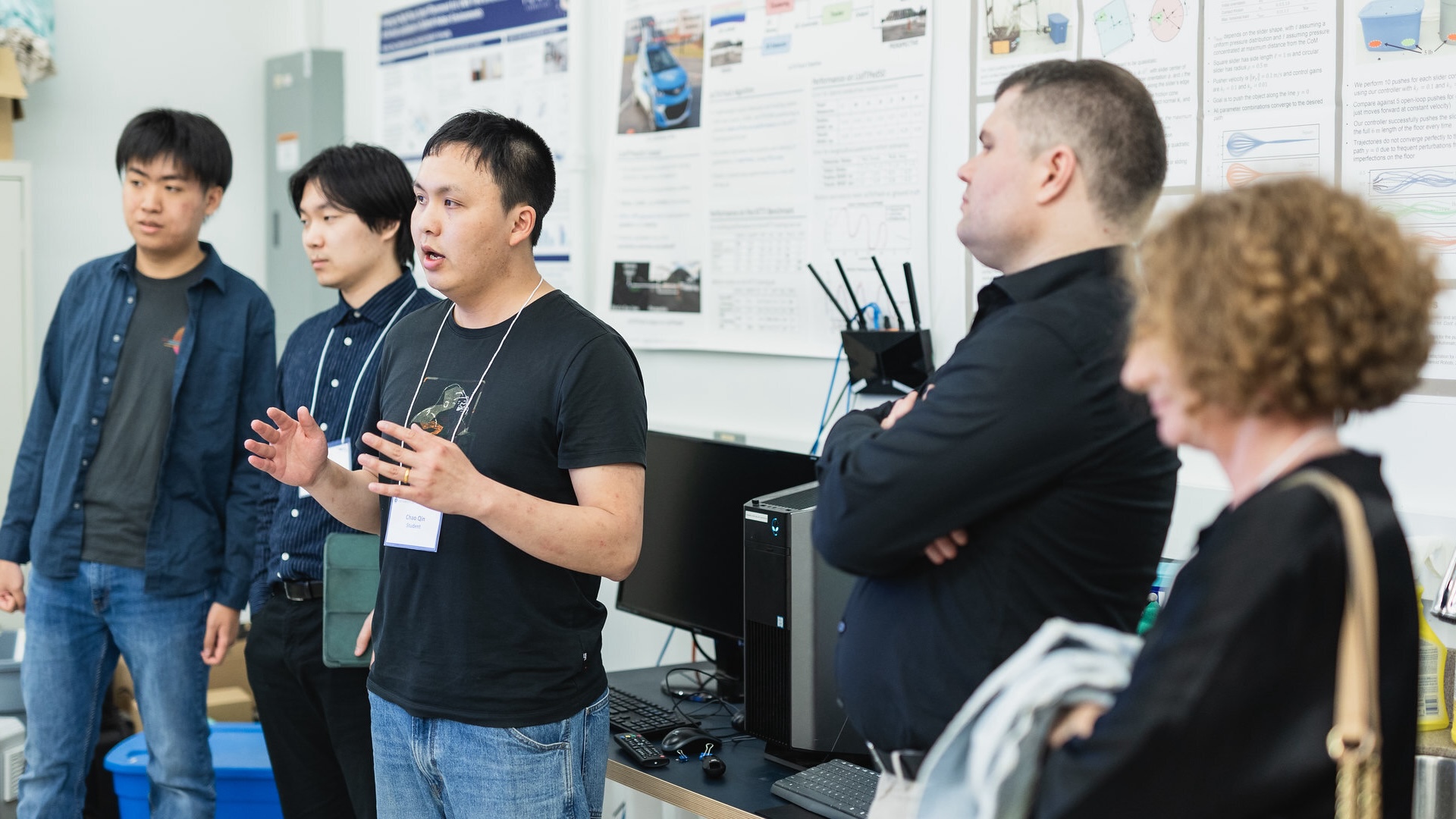 Presentation
Presentation
UTIAS 75th Anniversary Demo
On May 10, 2024, we performed five rounds of presentation followed by demonstration flights to alumni of the institute. The demos showcased the current development status of racing drones and the alumni are greatly intrigued by the progress and the system’s potential.
Read More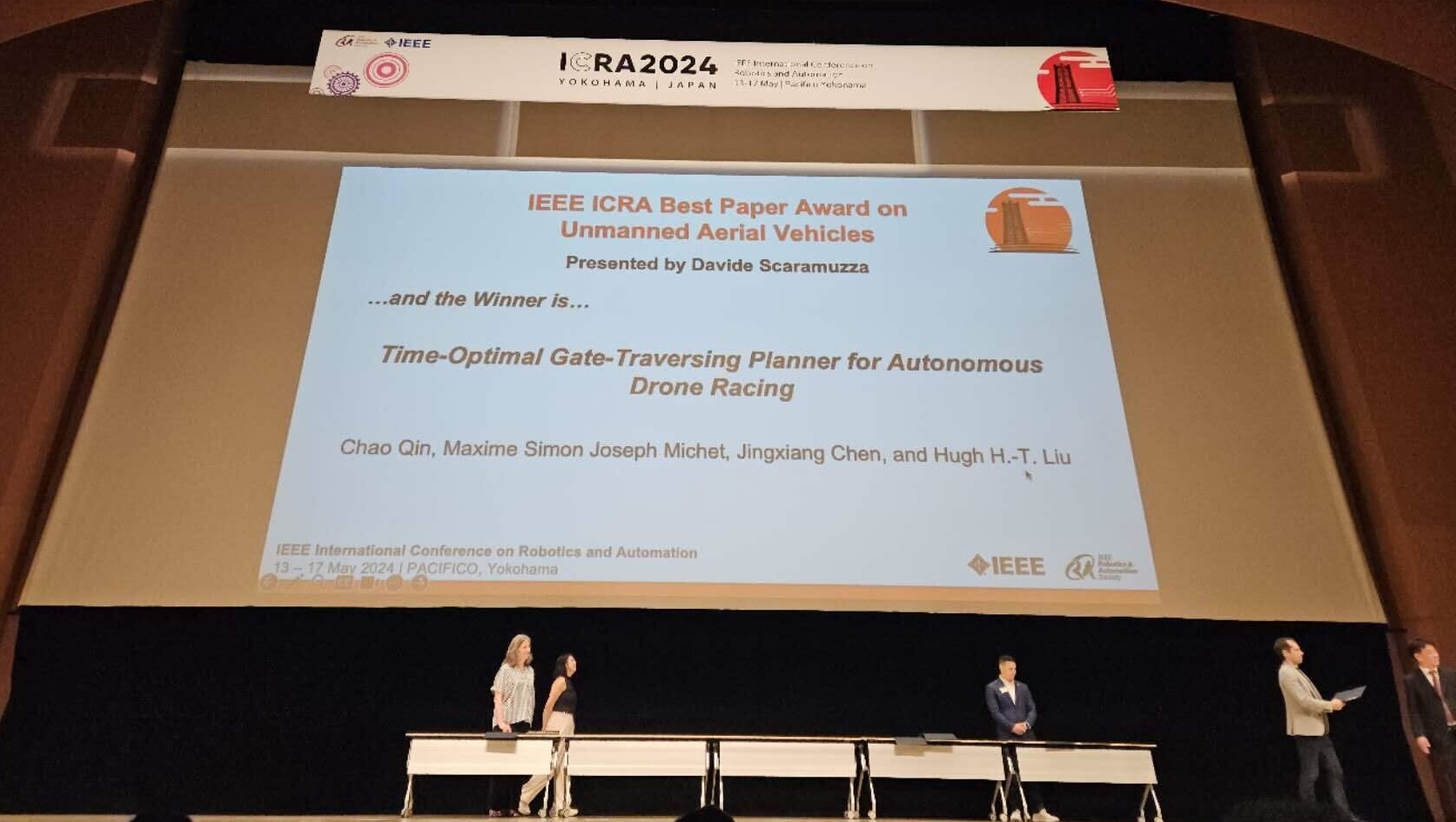 Icra 2024
Icra 2024
ADR Wins Best Paper Award on UAVs at ICRA
Our paper “Time-Optimal Gate-Traversing Planner for Autonomous Drone Racing” won the prestigious Best Paper Award in ICRA 2024, held in Yokohama, Japan.
Read More Hardware
Hardware
New Acquisition of Livox Mid360 LIDAR
We acquired the Livox Mid360 LIDAR sensor, which will help improve our SLAM and obstacle avoidance for the drone!
Read MoreLatest Posts
Simulation Development
15 Aug 2024