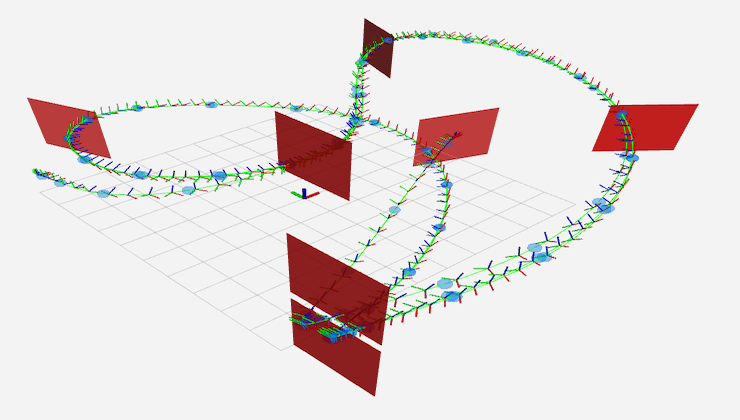
We submit a paper about our new algorithm on time-optimal trajectory planning for autonomous drone racing.